接口耗时暴增原因排查
起因: 调用方部门反馈某个内部接口耗时突然增加了,导致原本超时时间设置太小,而接口超时失败。
快速处理:调用方将接口超时时间增大到合适值
排查:通过监控查看该接口一周的调用情况,发现确实从2天前开始,接口耗时从100ms左右飙升到了3-4s。但是,接口调用请求量并没有暴涨,和之前差不多
- 先从代码入手,查看2天前的那个时间点后,代码上是否有变更导致。 结果:代码没有问题
- 构造一个测试数据,发起测试请求,得到的请求耗时正常100ms内。从日志中过找出一个耗时长的请求,重新测试,请求耗时3s
- 将接口中涉及到的所有SQL操作列出,搜索数据库慢日志,看是否有对应慢日志。结果:没有对应慢日志
- 根据耗时3s请求的参数,手动在数据库上执行SQL,SQL耗时正常,均在20ms完成。结果:SQL,数据库性能应该正常
- 接口业务中是否有调第三方API。结果:没有
- 接口业务中发现有用tcp方式非http方式调用第三方的服务。通过对比测试调用和不调用该tcp第三方服务,是该服务有问题。但由于这块老代码中,没有超时或者报错提示,导致日志中没有报错信息,问题被隐藏
解决方式:
- 通知该tcp服务负责人员
- 将该调用加上相应超时和报错信息日志
- 异步方式调用该tcp服务
还有哪些方向可以查:
- 局域网网络是否有问题
- DNS解析是否耗时过长
- 对应前置内部网关是否有问题
- 调用方部门的服务是否部署到了别的地域导致不再同一个局域网内
go context cancel不执行会怎样
If you fail to cancel the context, the goroutine that WithCancel or WithTimeout created will be retained in memory indefinitely (until the program shuts down), causing a memory leak. If you do this a lot, your memory will balloon significantly. It’s best practice to use a defer cancel() immediately after calling WithCancel() or WithTimeout()
很有可能会导致内存泄漏
在goroutine中往channel写入数据,很可能由于读取channel的逻辑错误而没法执行到读取channel而导致写入channel的goroutine一直阻塞,造成goroutine泄漏,GC也不会将其回收。该阻塞的goroutine实际上被认为还在使用
go 内存逃逸示例
golang程序变量会携带有一组校验数据,用来证明它的整个生命周期是否在运行时完全可知。如果变量通过了这些校验,它就可以在栈上分配。否则就说它 逃逸 了,必须在堆上分配。
能引起变量逃逸到堆上的典型情况:
- 在方法内把局部变量指针返回 局部变量原本应该在栈中分配,在栈中回收。但是由于返回时被外部引用,因此其生命周期大于栈,则溢出。
- 发送指针或带有指针的值到 channel 中。 在编译时,是没有办法知道哪个 goroutine 会在 channel 上接收数据。所以编译器没法知道变量什么时候才会被释放。
- 在一个切片上存储指针或带指针的值。 一个典型的例子就是 []*string 。这会导致切片的内容逃逸。尽管其后面的数组可能是在栈上分配的,但其引用的值一定是在堆上。
- slice 的背后数组被重新分配了,因为 append 时可能会超出其容量( cap )。 slice 初始化的地方在编译时是可以知道的,它最开始会在栈上分配。如果切片背后的存储要基于运行时的数据进行扩充,就会在堆上分配。
- 在 interface 类型上调用方法。 在 interface 类型上调用方法都是动态调度的 —— 方法的真正实现只能在运行时知道。想像一个 io.Reader 类型的变量 r , 调用 r.Read(b) 会使得 r 的值和切片b 的背后存储都逃逸掉,所以会在堆上分配
package main
import "fmt"
type A struct {
s string
}
// 这是上面提到的 "在方法内把局部变量指针返回" 的情况
func foo(s string) *A {
a := new(A)
a.s = s
return a //返回局部变量a,在C语言中妥妥野指针,但在go则ok,但a会逃逸到堆
}
func main() {
a := foo("hello")
b := a.s + " world"
c := b + "!"
fmt.Println(c)
}
// go build -gcflags=-m main.go
如何处理大量的写请求
一些具体的场景
- 如果相应的数据能够完全放入缓存中,可以考虑利用redis集群当数据库使用
- 如果写请求不需要立刻知道结果,业务逻辑上可以有一定的延迟。将写请求消息发到消息队列中(RocketMQ),通过消息队列消费者写入到数据库。消息队列有重试机制,能尽可能的提高成功率
- 对写请求即时性比较高,考虑先将写操作在缓存中进行,然后再通过消息队列持久化到数据库
写请求是量大,并非并发多
- 是否能够将写操作合为批量处理
- 数据库可以考虑使用分布式数据库
- 消息队列异步处理
自旋锁和互斥锁
自旋锁(spin lock)与互斥量(mutex)的比较 自旋锁是一种非阻塞锁,也就是说,如果某线程需要获取自旋锁,但该锁已经被其他线程占用时,该线程不会被挂起,而是在不断的消耗CPU的时间,不停的试图获取自旋锁。 互斥量是阻塞锁,当某线程无法获取互斥量时,该线程会被直接挂起,该线程不再消耗CPU时间,当其他线程释放互斥量后,操作系统会激活那个被挂起的线程,让其投入运行。
两种锁适用于不同场景: 如果是多核处理器,如果预计线程等待锁的时间很短,短到比线程两次上下文切换时间要少的情况下,使用自旋锁是划算的。 如果是多核处理器,如果预计线程等待锁的时间较长,至少比两次线程上下文切换的时间要长,建议使用互斥量。 如果是单核处理器,一般建议不要使用自旋锁。因为,在同一时间只有一个线程是处在运行状态,那如果运行线程发现无法获取锁,只能等待解锁,但因为自身不挂起,所以那个获取到锁的线程没有办法进入运行状态,只能等到运行线程把操作系统分给它的时间片用完,才能有机会被调度。这种情况下使用自旋锁的代价很高。 如果加锁的代码经常被调用,但竞争情况很少发生时,应该优先考虑使用自旋锁,自旋锁的开销比较小,互斥量的开销较大
- 自旋锁spinlock
自旋锁的主要特征是使用者在想要获得临界区执行权限时,如果临界区已经被加锁,那么自旋锁并不会阻塞睡眠,等待系统来主动唤醒,而是原地忙轮询资源是否被释放加锁,自旋就是自我旋转,这个名字还是很形象的。
自旋锁有它的优点就是避免了系统的唤醒,自己来执行轮询,如果在临界区的资源代码非常短且是原子的,那么使用起来是非常方便的,避免了各种上下文切换,开销非常小,因此在内核的一些数据结构中自旋锁被广泛的使用。
- 互斥锁mutex
使用者使用互斥锁时在访问共享资源之前对进行加锁操作,在访问完成之后进行解锁操作,谁加锁谁释放,其他使用者没有释放权限。 加锁后,任何其他试图再次加锁的线程会被阻塞,直到当前进程解锁。
区别于自旋锁,互斥锁无法获取锁时将阻塞睡眠,需要系统来唤醒,可以看出来自旋转自己原地旋转来确定锁被释放了,互斥锁由系统来唤醒,但是现实并不是那么美好的,因为很多业务逻辑系统是不知道的,仍然需要业务线程执行while来轮询是否可以重新加锁
###Trie树对Hash表
Trie树,即字典树,又称单词查找树或键树,是一种树形结构,是一种哈希树的变种。典型应用是用于统计和排序大量的字符串(但不仅限于字符串),所以经常被搜索引擎系统用于文本词频统计。它的优点是:最大限度地减少无谓的字符串比较,查询效率比哈希表高。
Trie的核心思想是空间换时间。利用字符串的公共前缀来降低查询时间的开销以达到提高效率的目的
- 根节点不包含字符,除根节点外每一个节点都只包含一个字符
- 从根节点到某一节点,路径上经过的字符连接起来,为该节点对应的字符串
- 每个节点的所有子节点包含的字符都不相同
使用redis为kv存储实现索引
kv中的数据是这样的: id => {status}xxx{created_at}
定义status有10中状态值:1-10
希望实现的索引,能够根据status搜索,并且可以按照created_at排序(倒序)输出。还能实现分页功能
- 实现一个B+树(这个方法比较复杂)
- 使用redis的zset有序集合
使用redis的zset有序集合可以实现一个类似”倒排索引”的索引结构
ZADD {status} {created_at} id
ZREVRANGE {status} 0 10 withscores
这样就根据created_at值倒序输出10个值
zset可以方便的实现根据score排序和分页
- 页面总数为:
ZCOUNT命令 - 当前页内容:
ZRANGE命令 - 若以倒序排列:
ZREVRANGE命令
zset也有移除操作,可以方便移除索引值
根据status进行搜索输出可否实现呢?
比如:需要得到status > 3 的结果。
-
遍历 4-10的key,把所有结果找出来,再合并,再根据created_at排序
-
使用zset的zunionstore:对给定的有序集合执行类似于集合的并集运算。
但是,使用zunionstore会有一个问题,当member 这里是status相同的话,会将score进行合并计算,这样就改变了原有的created_at值。因为zunionstore本质是进行交集合并操作。所以zunionstore的方法适合一个id只有一个status值的情况,这样合并的时候,status是不会有冲突重复的,合并后得到新的zset的created_at值是保留原始值,不会是合并值而更改。然后得到合并后新的zset可以进行分页,对created_at排序输出。
- 如果一个id可以有多个status呢?比如分页大小是10,需要遍历4-10的key,每个key根据created_at排序得到10个值,将这10个值放到一个数组中,再排序,再最后输出10个值。这步的操作和redis的命令几乎无关了,实际实现的效率可能就会差一些
https://segmentfault.com/a/1190000009821423
###在秒杀系统中redis存储库存的作用
redis中记录的库存主要用于即时判断库存是否充足,作用是过滤大部分秒杀请求,只接收库存数量的请求放入请求队列。并不需要与mysql中的库存保持强一致性。
所以本方案不需要保持两者数据的一致性。
异地多活,多主互相同步的基本原则
-
避免自增id的冲突
-
在某一时刻或时间段,通过一定的路由规则,保证某个用户的写操作只会在一个地域的数据库中操作,避免并发写不同主库的冲突问题
-
不需要异地多活的业务不进行异地多活,首先保证核心业务
-
避免冲突:首先我们通过全局定义的规则避免数据冲突,仔细设计的数据规则,让每笔数据都有自己的归属机房,两个机房同时修改一笔数据的情况很少出现。两个机房产生的数据在 ID 上是错开的,各种和业务相关的ID 也通过设计避免了重复,这样数据复制到一起后,不会发生冲突。对于有唯一键索引的数据,我们也进行了改造,加上了用于区别机房的数据字段
火焰图怎么看
主要就是看那些比较宽大的火苗,特别留意那些类似平顶山的火苗
redis主从复制
master主从模式
全量同步 Redis全量复制一般发生在Slave初始化阶段,这时Slave需要将Master上的所有数据都复制一份。具体步骤如下:
- 从服务器连接主服务器,发送SYNC命令;
- 主服务器接收到SYNC命名后,开始执行BGSAVE命令生成RDB文件并使用缓冲区记录此后执行的所有写命令;
- 主服务器BGSAVE执行完后,向所有从服务器发送快照文件,并在发送期间继续记录被执行的写命令;
- 从服务器收到快照文件后丢弃所有旧数据,载入收到的快照;
- 主服务器快照发送完毕后开始向从服务器发送缓冲区中的写命令;
- 从服务器完成对快照的载入,开始接收命令请求,并执行来自主服务器缓冲区的写命令
增量同步
Redis增量复制是指Slave初始化后开始正常工作时主服务器发生的写操作同步到从服务器的过程。 增量复制的过程主要是主服务器每执行一个写命令就会向从服务器发送相同的写命令,从服务器接收并执行收到的写命令
https://www.cnblogs.com/daofaziran/p/10978628.html
Redis的RDB持久化实现是folk一个子进程,然后让子进程将内存镜像dump到RDB文件中。理论上来说是需要跟父进程一样的内存空间,也就是27.55G,但是由于Linux很早就支持的copy-on-write技术,所以实际上并不需要这么多的物理内存的,这个可以从log中分析出来。我们这个Redis最多只有150M左右的COW内存。
每次保存 RDB 的时候,Redis 都要 fork() 出一个子进程,并由子进程来进行实际的持久化工作。在数据集比较庞大时, fork()可能会非常耗时,造成服务器在某某毫秒内停止处理客户端;如果数据集非常巨大,并且 CPU 时间非常紧张的话,那么这种停止时间甚至可能会长达整整一秒
cluster主从模式
一个master可以有多个slave。在同一个节点上的所有slot的所有的写操作都会被从master节点异步复制到所有的slave节点
bitmap的内存占用
2^32次方是4294967296(42亿+),如果是一个bitmap就是4294967296位,大约512M。1亿个bit,是95.3M
给定a、b两个文件,各存放50亿个url,每个url各占64字节,内存限制是4G,让你找出a、b文件共同的url
方案1:可以估计每个文件安的大小为5G×64=320G,远远大于内存限制的4G。所以不可能将其完全加载到内存中处理。考虑采取分而治之的方法。
遍历文件a,对每个url求取hash(url)%1000,然后根据所取得的值将url分别存储到1000个小文件(记为a0,a1,...,a999)中。这样每个小文件的大约为300M。
遍历文件b,采取和a相同的方式将url分别存储到1000小文件(记为b0,b1,...,b999)。这样处理后,所有可能相同的url都在对应的小文件(a0vsb0,a1vsb1,...,a999vsb999)中,不对应的小文件不可能有相同的url。然后我们只要求出1000对小文件中相同的url即可。
求每对小文件中相同的url时,可以把其中一个小文件的url存储到hash_set中。然后遍历另一个小文件的每个url,看其是否在刚才构建的hash_set中,如果是,那么就是共同的url,存到文件里面就可以了。
方案2:如果允许有一定的错误率,可以使用Bloom filter,4G内存大概可以表示340亿bit。将其中一个文件中的url使用Bloom filter映射为这340亿bit,然后挨个读取另外一个文件的url,检查是否与Bloom filter,如果是,那么该url应该是共同的url(注意会有一定的错误率)
###服务降级
从概念上来说,所谓的服务降级,是当服务器压力剧增的情况下,根据当前业务情况及流量对一些服务和页面进行策略性的屏蔽或降低服务质量,以此释放服务器资源以保证核心任务的正常运行。
从使用场景来说,当整个微服务架构整体的负载超出了预设的上限阈值或即将到来的流量预计将会超过预设的阈值时,为了保证重要或基本的服务能正常运行,我们可以将一些不重要或不紧急的服务或任务进行服务的延迟使用或暂停使用。
服务降级的方式或策略其实有多种,除了限流和熔断,常用的还有以下这些:
-
关闭次要服务:在服务压力过大时,关闭非核心功能的服务,避免核心功能被拖垮。比如,淘宝双11活动当天,订单量激增,为了保证核心的交易业务的高可用,就会暂时关闭非核心的退货服务。
-
丢弃部分请求:对于一些老请求——即从接收到处理的时间已经超过了一定时间(比如1s)的请求,可以直接丢弃。还可以根据请求的优先级,有选择性地丢弃那些优先级低的请求。或者随机丢弃一定比例的请求。
-
读降级:对于读一致性要求不高的场景,在服务和数据库压力过大时,可以不读数据库,降级为只读缓存数据,以这种方式来减小数据库压力,提高服务的吞吐量。对于列表、分页功能,原本返回20个记录,给予返回5个记录。并且关闭跳过大量分页的查询
-
写降级:在服务压力过大时,可以将同步写转为异步写,来减小服务压力并提高吞吐量。既然把同步改成了异步也就意味着降低了数据一致性,保证数据最终一致即可。
-
屏蔽写入:很多高并发场景下,查询请求都会走缓存,这时数据库的压力主要是写入压力。所以对于某些不重要的服务,在服务和数据库压力过大时,可以关闭写入功能,只保留查询功能,这样可以明显减小数据库压力。
-
数据冗余:服务调用者可以冗余它所依赖服务的数据。当依赖的服务故障时,服务调用者可以直接使用冗余数据。
以上列出来的只是部分降级方式而已,并没有涵盖所有情况。实际上,关于服务降级的方式和策略,并没有什么定式,也没有标准可言。不过,所有的降级方案都要以满足业务需求为前提,都是为了提高系统的可用性,保证核心功能正常运行。
从分类上来说,可以把服务降级分为手动降级和自动降级两大类。手动降级应用较多,主要通过开关的方式开启或关闭降级。自动降级,比如限流和熔断就属于这一类。手动降级大多也可以做成自动的方式,可根据各种系统指标配置阈值,当相应指标达到阈值时则自动开启降级。不过,在很多场景下,由于业务比较复杂,指标太多,自动降级实现起来难度比较大,而且也容易出错。所以在考虑做自动降级之前一定要充分做好评估,相应的自动降级方案也要考虑周全。
熔断的作用 熔断模式可以防止应用程序不断地尝试可能超时和失败的服务,能达到应用程序执行而不必等待下游服务修正错误服务。熔断器模式最牛的是能让应用程序自我诊断下游系统的错误是否已经修正,如果没有,不放量去请求,如果请求成功了,慢慢的增加请求,再次尝试调用
为什么存在大端模式小端模式
计算机系统中内存是以字节为单位进行编址的,每个地址单元都唯一的对应着1个字节(8 bit)。这可以应对char类型数据的存储要求,因为char类型长度刚好是1个字节,但是有些类型的长度是超过1个字节的(字符串虽然是多字节的,但它本质是由一个个char类型组成的类似数组的结构而已),比如C/C++中,short类型一般是2个字节,int类型一般4个字节等。因此这里就存在着一个如何安排多个字节数据中各字节存放顺序的问题。正是因为不同的安排顺序导致了大端存储模式和小端存储模式的存在。
小端模式
小端模式:是指数据的高字节保存在内存的高地址中,而数据的低字节保存在内存的低地址中。 简单的说就是低地址存低位,高地址存高位
为了方便说明,使用16进制表示这两个数,即0x12345678和0x11223344。小端模式采用以下方式存储这个两个数字:

大端模式
大端模式:是指数据的高字节保存在内存的低地址中,而数据的低字节保存在内存的高地址中。 简单的上,就是低地址存高位,高地址存低位(跟人读写数值的顺序一样) 为了方便说明,使用16进制表示这两个数,即0x12345678和0x11223344。大端模式采用以下方式存储这个两个数字:

为什么没有统一成一个标准
一言以蔽之,这两种模式各有各的优点。
小端模式优点:
- 内存的低地址处存放低字节,所以在强制转换数据时不需要调整字节的内容(注解:比如把int的4字节强制转换成short的2字节时,就直接把int数据存储的前两个字节给short就行,因为其前两个字节刚好就是最低的两个字节,符合转换逻辑);
- CPU做数值运算时从内存中依顺序依次从低位到高位取数据进行运算,直到最后刷新最高位的符号位,这样的运算方式会更高效
大端模式优点:符号位在所表示的数据的内存的第一个字节中,便于快速判断数据的正负和大小
其各自的优点就是对方的缺点,正因为两者彼此不分伯仲,再加上一些硬件厂商的坚持,因此在多字节存储顺序上始终没有一个统一的标准
网络字节序
不同的计算机使用的字节序可能不同,即有可能有的使用大端模式有的使用小端模式。那使用不同字节序模式的计算机如何进行通信呢? (目前个人PC大部分都是X86的小端模式) TCP/IP协议隆重出场,RFC1700规定使用“大端”字节序为网络字节序,其他不使用大端的计算机要注意了,发送数据的时候必须要将自己的主机字节序转换为网络字节序(即“大端”字节序),接收到的数据再转换为自己的主机字节序。这样就与CPU、操作系统无关了,实现了网络通信的标准化。
为了程序的兼容,你会看到,程序员们每次发送和接收数据都要进行转换,这样做的目的是保证代码在任何计算机上执行时都能达到预期的效果。
这么常用的操作,BSD Socket提供了封装好的转换接口,方便程序员使用。 包括从主机字节序到网络字节序的转换函数:htons、htonl;从网络字节序到主机字节序的转换函数:ntohs、ntohl
业务上的防重操作的必要性
如果你的接口,消息消费不是幂等的,一定要在业务上进行去重,比如有唯一标识,能根据唯一标识进行去重复识别。
不能单纯依靠系统或消息队列的去重能力
使用base64.RawURLEncondig.DecodeString
Golang中进行base64解码操作请使用base64.RawURLEncondig.DecodeString
https://blog.csdn.net/u014270740/article/details/91038606
零拷贝简记
磁盘可以说是计算机系统最慢的硬件之一,读写速度相差内存 10 倍以上,所以针对优化磁盘的技术非常的多,比如零拷贝、直接 I/O、异步 I/O 等等,这些优化的目的就是为了提高系统的吞吐量,另外操作系统内核中的磁盘高速缓存区,可以有效的减少磁盘的访问次数。
这次,我们就以「文件传输」作为切入点,来分析 I/O 工作方式,以及如何优化传输文件的性能。
正文
为什么要有 DMA 技术?
在没有 DMA 技术前,I/O 的过程是这样的:
- CPU 发出对应的指令给磁盘控制器,然后返回;
- 磁盘控制器收到指令后,于是就开始准备数据,会把数据放入到磁盘控制器的内部缓冲区中,然后产生一个中断;
- CPU 收到中断信号后,停下手头的工作,接着把磁盘控制器的缓冲区的数据一次一个字节地读进自己的寄存器,然后再把寄存器里的数据写入到内存,而在数据传输的期间 CPU 是无法执行其他任务的。
为了方便你理解,我画了一副图:
可以看到,整个数据的传输过程,都要需要 CPU 亲自参与搬运数据的过程,而且这个过程,CPU 是不能做其他事情的。
简单的搬运几个字符数据那没问题,但是如果我们用千兆网卡或者硬盘传输大量数据的时候,都用 CPU 来搬运的话,肯定忙不过来。
计算机科学家们发现了事情的严重性后,于是就发明了 DMA 技术,也就是直接内存访问(*Direct Memory Access*) 技术。
什么是 DMA 技术?简单理解就是,在进行 I/O 设备和内存的数据传输的时候,数据搬运的工作全部交给 DMA 控制器,而 CPU 不再参与任何与数据搬运相关的事情,这样 CPU 就可以去处理别的事务。
那使用 DMA 控制器进行数据传输的过程究竟是什么样的呢?下面我们来具体看看。
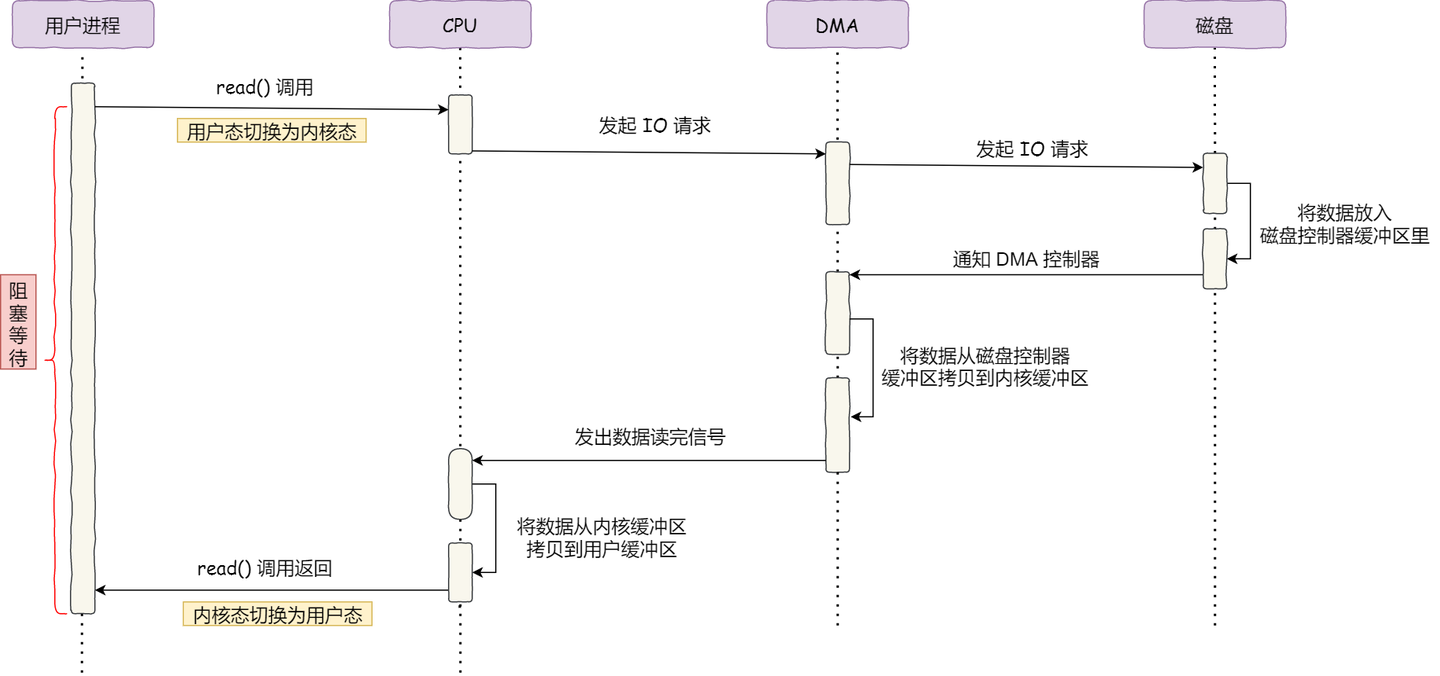
具体过程:
- 用户进程调用 read 方法,向操作系统发出 I/O 请求,请求读取数据到自己的内存缓冲区中,进程进入阻塞状态;
- 操作系统收到请求后,进一步将 I/O 请求发送 DMA,然后让 CPU 执行其他任务;
- DMA 进一步将 I/O 请求发送给磁盘;
- 磁盘收到 DMA 的 I/O 请求,把数据从磁盘读取到磁盘控制器的缓冲区中,当磁盘控制器的缓冲区被读满后,向 DMA 发起中断信号,告知自己缓冲区已满;
- DMA 收到磁盘的信号,将磁盘控制器缓冲区中的数据拷贝到内核缓冲区中,此时不占用 CPU,CPU 可以执行其他任务;
- 当 DMA 读取了足够多的数据,就会发送中断信号给 CPU;
- CPU 收到 DMA 的信号,知道数据已经准备好,于是将数据从内核拷贝到用户空间,系统调用返回;
可以看到, 整个数据传输的过程,CPU 不再参与数据搬运的工作,而是全程由 DMA 完成,但是 CPU 在这个过程中也是必不可少的,因为传输什么数据,从哪里传输到哪里,都需要 CPU 来告诉 DMA 控制器。
早期 DMA 只存在在主板上,如今由于 I/O 设备越来越多,数据传输的需求也不尽相同,所以每个 I/O 设备里面都有自己的 DMA 控制器。
传统的文件传输有多糟糕?
如果服务端要提供文件传输的功能,我们能想到的最简单的方式是:将磁盘上的文件读取出来,然后通过网络协议发送给客户端。
传统 I/O 的工作方式是,数据读取和写入是从用户空间到内核空间来回复制,而内核空间的数据是通过操作系统层面的 I/O 接口从磁盘读取或写入。
代码通常如下,一般会需要两个系统调用:
read(file, tmp_buf, len);
write(socket, tmp_buf, len);
代码很简单,虽然就两行代码,但是这里面发生了不少的事情。
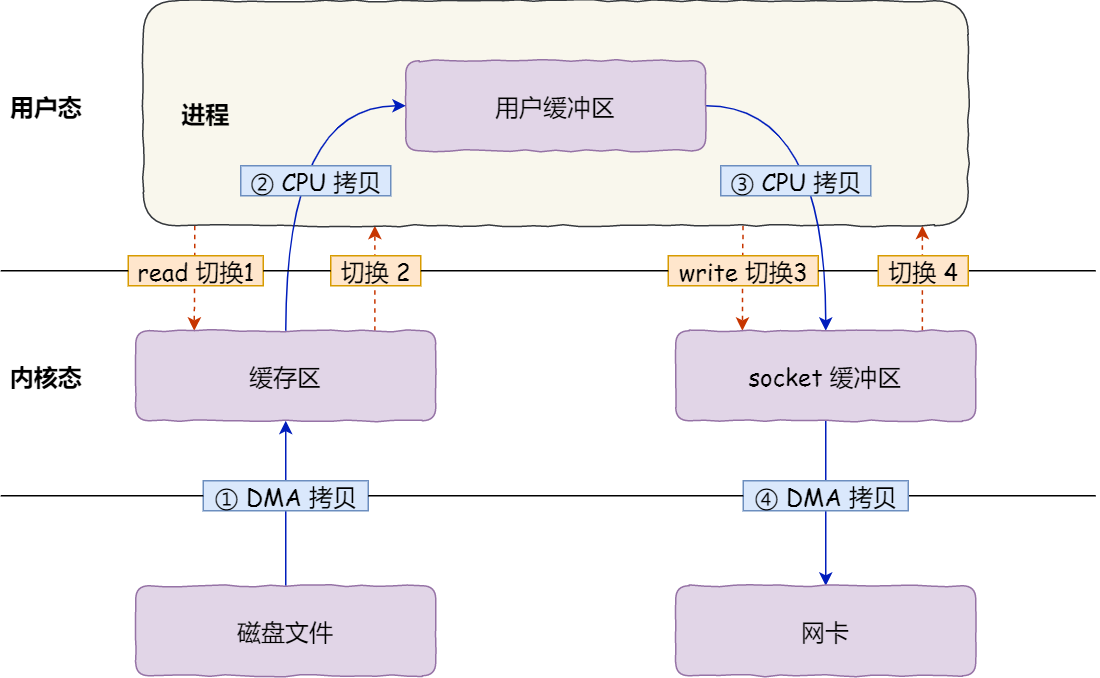
首先,期间共发生了 4 次用户态与内核态的上下文切换,因为发生了两次系统调用,一次是 read() ,一次是 write(),每次系统调用都得先从用户态切换到内核态,等内核完成任务后,再从内核态切换回用户态。
上下文切换到成本并不小,一次切换需要耗时几十纳秒到几微秒,虽然时间看上去很短,但是在高并发的场景下,这类时间容易被累积和放大,从而影响系统的性能。
其次,还发生了 4 次数据拷贝,其中两次是 DMA 的拷贝,另外两次则是通过 CPU 拷贝的,下面说一下这个过程:
- 第一次拷贝,把磁盘上的数据拷贝到操作系统内核的缓冲区里,这个拷贝的过程是通过 DMA 搬运的。
- 第二次拷贝,把内核缓冲区的数据拷贝到用户的缓冲区里,于是我们应用程序就可以使用这部分数据了,这个拷贝到过程是由 CPU 完成的。
- 第三次拷贝,把刚才拷贝到用户的缓冲区里的数据,再拷贝到内核的 socket 的缓冲区里,这个过程依然还是由 CPU 搬运的。
- 第四次拷贝,把内核的 socket 缓冲区里的数据,拷贝到网卡的缓冲区里,这个过程又是由 DMA 搬运的。
我们回过头看这个文件传输的过程,我们只是搬运一份数据,结果却搬运了 4 次,过多的数据拷贝无疑会消耗 CPU 资源,大大降低了系统性能。
这种简单又传统的文件传输方式,存在冗余的上文切换和数据拷贝,在高并发系统里是非常糟糕的,多了很多不必要的开销,会严重影响系统性能。
所以,要想提高文件传输的性能,就需要减少「用户态与内核态的上下文切换」和「内存拷贝」的次数。
如何优化文件传输的性能?
先来看看,如何减少「用户态与内核态的上下文切换」的次数呢?
读取磁盘数据的时候,之所以要发生上下文切换,这是因为用户空间没有权限操作磁盘或网卡,内核的权限最高,这些操作设备的过程都需要交由操作系统内核来完成,所以一般要通过内核去完成某些任务的时候,就需要使用操作系统提供的系统调用函数。
而一次系统调用必然会发生 2 次上下文切换:首先从用户态切换到内核态,当内核执行完任务后,再切换回用户态交由进程代码执行。
所以,要想减少上下文切换到次数,就要减少系统调用的次数。
再来看看,如何减少「数据拷贝」的次数?
在前面我们知道了,传统的文件传输方式会历经 4 次数据拷贝,而且这里面,「从内核的读缓冲区拷贝到用户的缓冲区里,再从用户的缓冲区里拷贝到 socket 的缓冲区里」,这个过程是没有必要的。
因为文件传输的应用场景中,在用户空间我们并不会对数据「再加工」,所以数据实际上可以不用搬运到用户空间,因此用户的缓冲区是没有必要存在的。
如何实现零拷贝?
零拷贝技术实现的方式通常有 2 种:
- mmap + write
- sendfile
下面就谈一谈,它们是如何减少「上下文切换」和「数据拷贝」的次数。
mmap + write
在前面我们知道,read() 系统调用的过程中会把内核缓冲区的数据拷贝到用户的缓冲区里,于是为了减少这一步开销,我们可以用 mmap() 替换 read() 系统调用函数。
buf = mmap(file, len);
write(sockfd, buf, len);
mmap() 系统调用函数会直接把内核缓冲区里的数据「映射」到用户空间,这样,操作系统内核与用户空间就不需要再进行任何的数据拷贝操作。
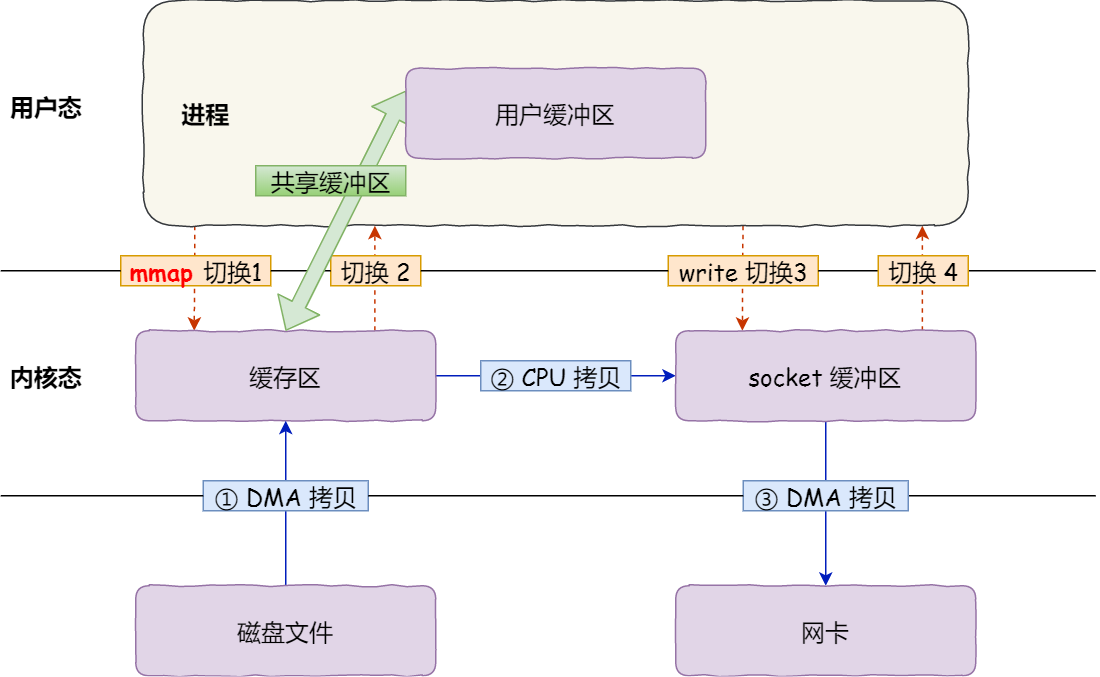
具体过程如下:
- 应用进程调用了
mmap()后,DMA 会把磁盘的数据拷贝到内核的缓冲区里。接着,应用进程跟操作系统内核「共享」这个缓冲区; - 应用进程再调用
write(),操作系统直接将内核缓冲区的数据拷贝到 socket 缓冲区中,这一切都发生在内核态,由 CPU 来搬运数据; - 最后,把内核的 socket 缓冲区里的数据,拷贝到网卡的缓冲区里,这个过程是由 DMA 搬运的。
我们可以得知,通过使用 mmap() 来代替 read(), 可以减少一次数据拷贝的过程。
但这还不是最理想的零拷贝,因为仍然需要通过 CPU 把内核缓冲区的数据拷贝到 socket 缓冲区里,而且仍然需要 4 次上下文切换,因为系统调用还是 2 次。
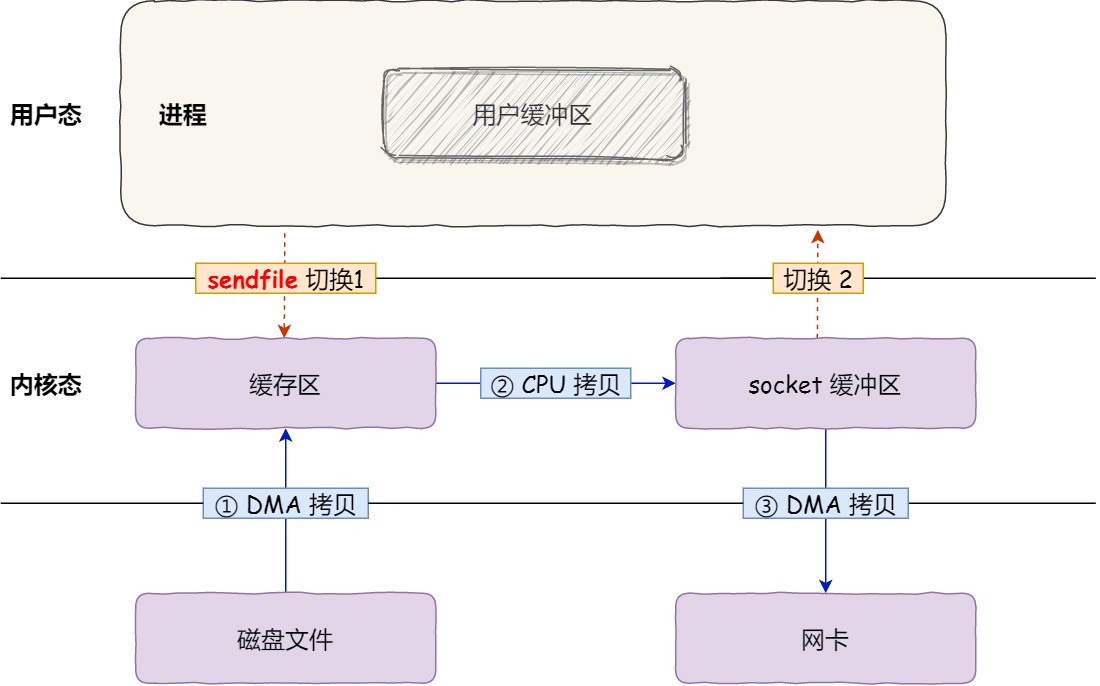
sendfile
在 Linux 内核版本 2.1 中,提供了一个专门发送文件的系统调用函数 sendfile(),函数形式如下:
#include <sys/socket.h>
ssize_t sendfile(int out_fd, int in_fd, off_t *offset, size_t count);
它的前两个参数分别是目的端和源端的文件描述符,后面两个参数是源端的偏移量和复制数据的长度,返回值是实际复制数据的长度。
首先,它可以替代前面的 read() 和 write() 这两个系统调用,这样就可以减少一次系统调用,也就减少了 2 次上下文切换的开销。
其次,该系统调用,可以直接把内核缓冲区里的数据拷贝到 socket 缓冲区里,不再拷贝到用户态,这样就只有 2 次上下文切换,和 3 次数据拷贝。如下图:
但是这还不是真正的零拷贝技术,如果网卡支持 SG-DMA(The Scatter-Gather Direct Memory Access)技术(和普通的 DMA 有所不同),我们可以进一步减少通过 CPU 把内核缓冲区里的数据拷贝到 socket 缓冲区的过程。
你可以在你的 Linux 系统通过下面这个命令,查看网卡是否支持 scatter-gather 特性:
$ ethtool -k eth0 | grep scatter-gather
scatter-gather: on
于是,从 Linux 内核 2.4 版本开始起,对于支持网卡支持 SG-DMA 技术的情况下, sendfile() 系统调用的过程发生了点变化,具体过程如下:
- 第一步,通过 DMA 将磁盘上的数据拷贝到内核缓冲区里;
- 第二步,缓冲区描述符和数据长度传到 socket 缓冲区,这样网卡的 SG-DMA 控制器就可以直接将内核缓存中的数据拷贝到网卡的缓冲区里,此过程不需要将数据从操作系统内核缓冲区拷贝到 socket 缓冲区中,这样就减少了一次数据拷贝;
所以,这个过程之中,只进行了 2 次数据拷贝,如下图:
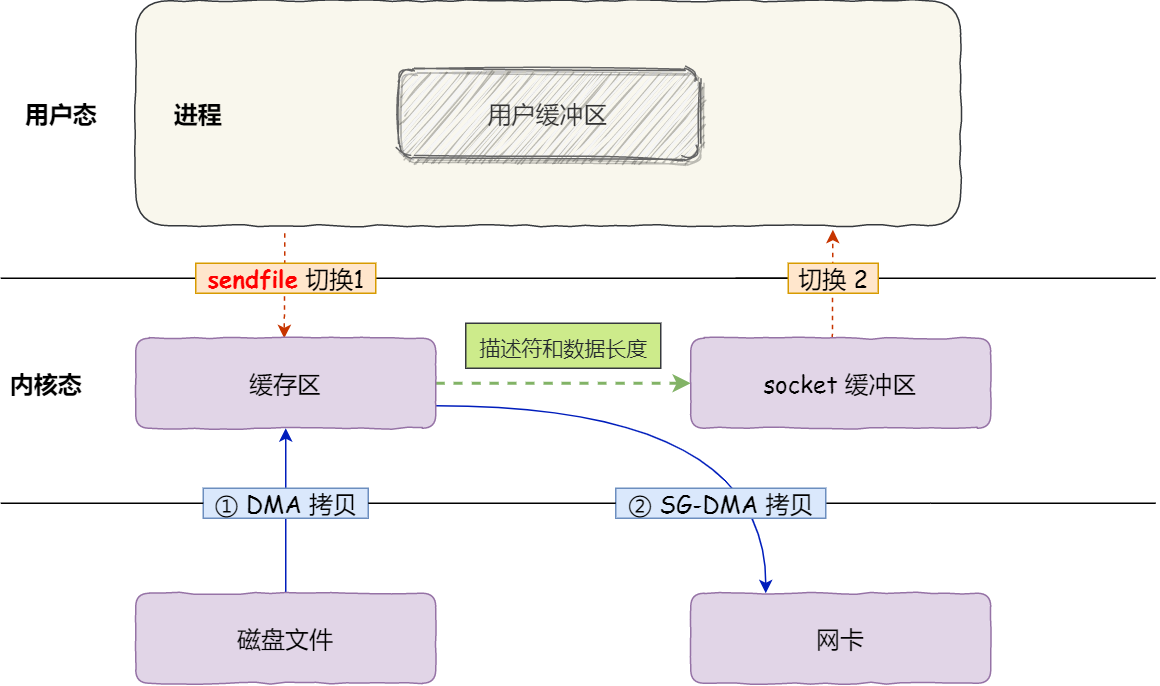
这就是所谓的零拷贝(*Zero-copy*)技术,因为我们没有在内存层面去拷贝数据,也就是说全程没有通过 CPU 来搬运数据,所有的数据都是通过 DMA 来进行传输的。。
零拷贝技术的文件传输方式相比传统文件传输的方式,减少了 2 次上下文切换和数据拷贝次数,只需要 2 次上下文切换和数据拷贝次数,就可以完成文件的传输,而且 2 次的数据拷贝过程,都不需要通过 CPU,2 次都是由 DMA 来搬运。
所以,总体来看,零拷贝技术可以把文件传输的性能提高至少一倍以上。
使用零拷贝技术的项目
事实上,Kafka 这个开源项目,就利用了「零拷贝」技术,从而大幅提升了 I/O 的吞吐率,这也是 Kafka 在处理海量数据为什么这么快的原因之一。
如果你追溯 Kafka 文件传输的代码,你会发现,最终它调用了 Java NIO 库里的 transferTo 方法:
@Overridepublic
long transferFrom(FileChannel fileChannel, long position, long count) throws IOException {
return fileChannel.transferTo(position, count, socketChannel);
}
如果 Linux 系统支持 sendfile() 系统调用,那么 transferTo() 实际上最后就会使用到 sendfile() 系统调用函数。
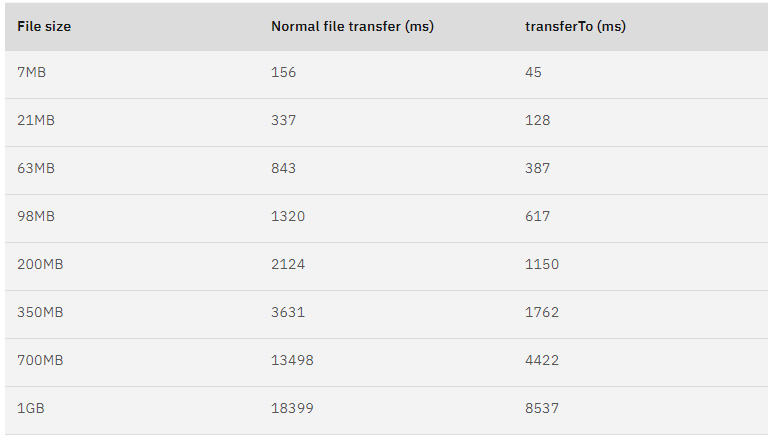
曾经有大佬专门写过程序测试过,在同样的硬件条件下,传统文件传输和零拷拷贝文件传输的性能差异,你可以看到下面这张测试数据图,使用了零拷贝能够缩短 65% 的时间,大幅度提升了机器传输数据的吞吐量。
另外,Nginx 也支持零拷贝技术,一般默认是开启零拷贝技术,这样有利于提高文件传输的效率,是否开启零拷贝技术的配置如下:
http {
...
sendfile on
...
}
sendfile 配置的具体意思:
- 设置为 on 表示,使用零拷贝技术来传输文件:sendfile ,这样只需要 2 次上下文切换,和 2 次数据拷贝。
- 设置为 off 表示,使用传统的文件传输技术:read + write,这时就需要 4 次上下文切换,和 4 次数据拷贝。
当然,要使用 sendfile,Linux 内核版本必须要 2.1 以上的版本。
PageCache 有什么作用?
回顾前面说道文件传输过程,其中第一步都是先需要先把磁盘文件数据拷贝「内核缓冲区」里,这个「内核缓冲区」实际上是磁盘高速缓存(*PageCache*)。
由于零拷贝使用了 PageCache 技术,可以使得零拷贝进一步提升了性能,我们接下来看看 PageCache 是如何做到这一点的。
读写磁盘相比读写内存的速度慢太多了,所以我们应该想办法把「读写磁盘」替换成「读写内存」。于是,我们会通过 DMA 把磁盘里的数据搬运到内存里,这样就可以用读内存替换读磁盘。
但是,内存空间远比磁盘要小,内存注定只能拷贝磁盘里的一小部分数据。
那问题来了,选择哪些磁盘数据拷贝到内存呢?
我们都知道程序运行的时候,具有「局部性」,所以通常,刚被访问的数据在短时间内再次被访问的概率很高,于是我们可以用 PageCache 来缓存最近被访问的数据,当空间不足时淘汰最久未被访问的缓存。
所以,读磁盘数据的时候,优先在 PageCache 找,如果数据存在则可以直接返回;如果没有,则从磁盘中读取,然后缓存 PageCache 中。
还有一点,读取磁盘数据的时候,需要找到数据所在的位置,但是对于机械磁盘来说,就是通过磁头旋转到数据所在的扇区,再开始「顺序」读取数据,但是旋转磁头这个物理动作是非常耗时的,为了降低它的影响,PageCache 使用了「预读功能」。
比如,假设 read 方法每次只会读 32 KB 的字节,虽然 read 刚开始只会读 0 ~ 32 KB 的字节,但内核会把其后面的 32~64 KB 也读取到 PageCache,这样后面读取 32~64 KB 的成本就很低,如果在 32~64 KB 淘汰出 PageCache 前,进程读取到它了,收益就非常大。
所以,PageCache 的优点主要是两个:
- 缓存最近被访问的数据;
- 预读功能;
这两个做法,将大大提高读写磁盘的性能。
但是,在传输大文件(GB 级别的文件)的时候,PageCache 会不起作用,那就白白浪费 DMA 多做的一次数据拷贝,造成性能的降低,即使使用了 PageCache 的零拷贝也会损失性能
这是因为如果你有很多 GB 级别文件需要传输,每当用户访问这些大文件的时候,内核就会把它们载入 PageCache 中,于是 PageCache 空间很快被这些大文件占满。
另外,由于文件太大,可能某些部分的文件数据被再次访问的概率比较低,这样就会带来 2 个问题:
- PageCache 由于长时间被大文件占据,其他「热点」的小文件可能就无法充分使用到 PageCache,于是这样磁盘读写的性能就会下降了;
- PageCache 中的大文件数据,由于没有享受到缓存带来的好处,但却耗费 DMA 多拷贝到 PageCache 一次;
所以,针对大文件的传输,不应该使用 PageCache,也就是说不应该使用零拷贝技术,因为可能由于 PageCache 被大文件占据,而导致「热点」小文件无法利用到 PageCache,这样在高并发的环境下,会带来严重的性能问题。
大文件传输用什么方式实现?
那针对大文件的传输,我们应该使用什么方式呢?
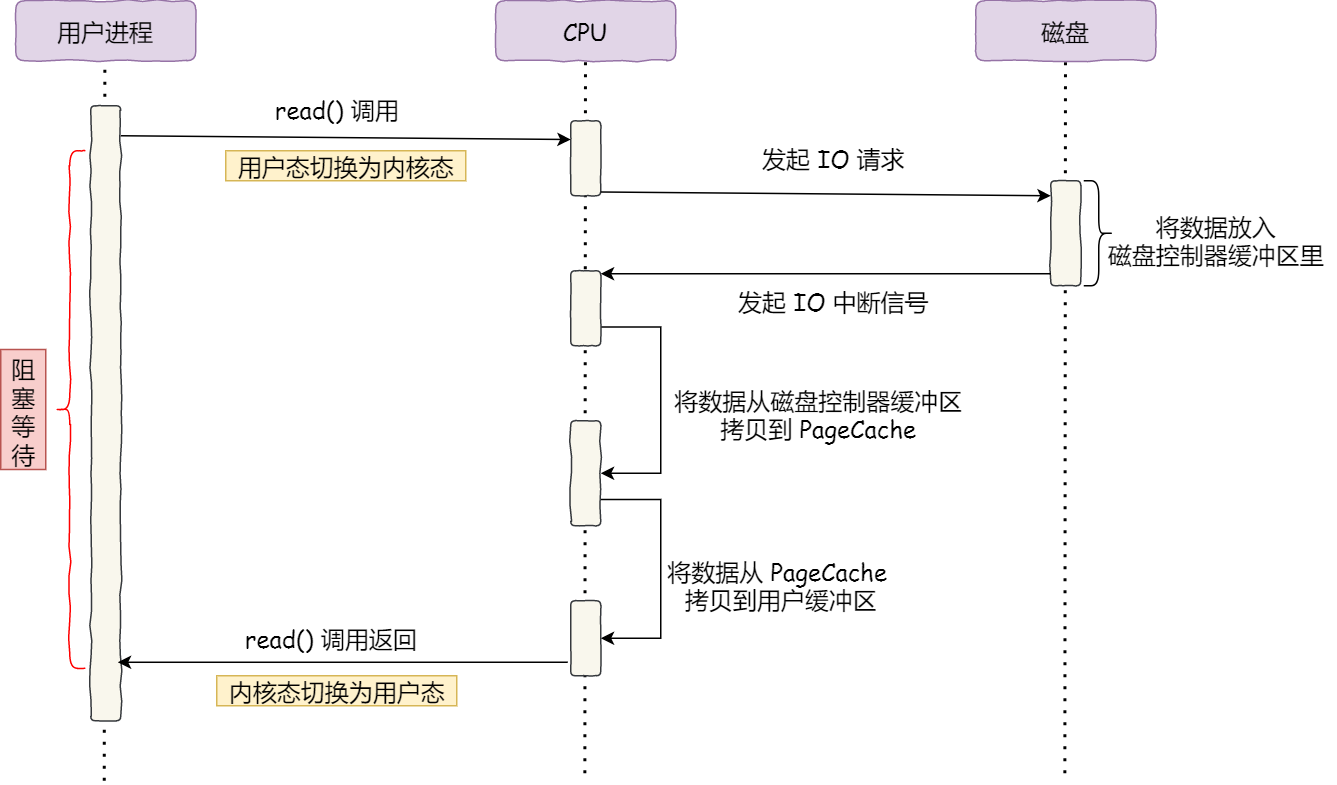
我们先来看看最初的例子,当调用 read 方法读取文件时,进程实际上会阻塞在 read 方法调用,因为要等待磁盘数据的返回,如下图:
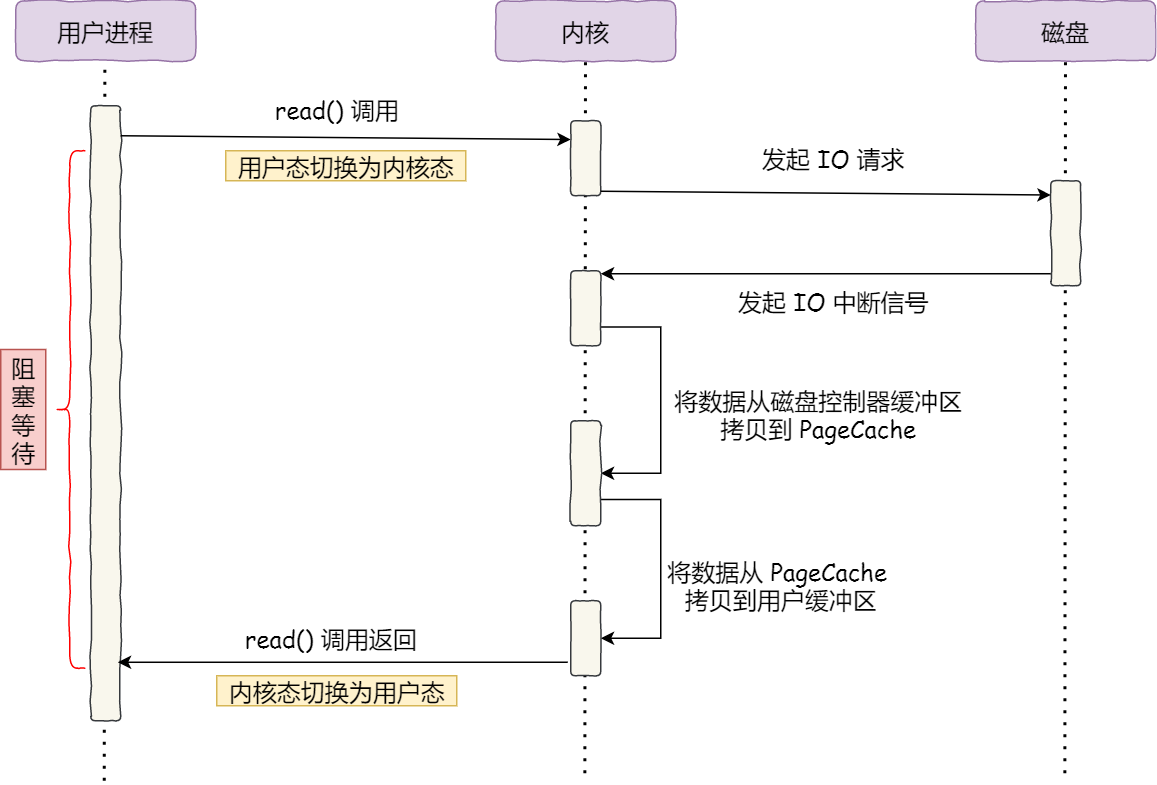
具体过程:
- 当调用 read 方法时,会阻塞着,此时内核会向磁盘发起 I/O 请求,磁盘收到请求后,便会寻址,当磁盘数据准备好后,就会向内核发起 I/O 中断,告知内核磁盘数据已经准备好;
- 内核收到 I/O 中断后,就将数据从磁盘控制器缓冲区拷贝到 PageCache 里;
- 最后,内核再把 PageCache 中的数据拷贝到用户缓冲区,于是 read 调用就正常返回了。
对于阻塞的问题,可以用异步 I/O 来解决,它工作方式如下图:
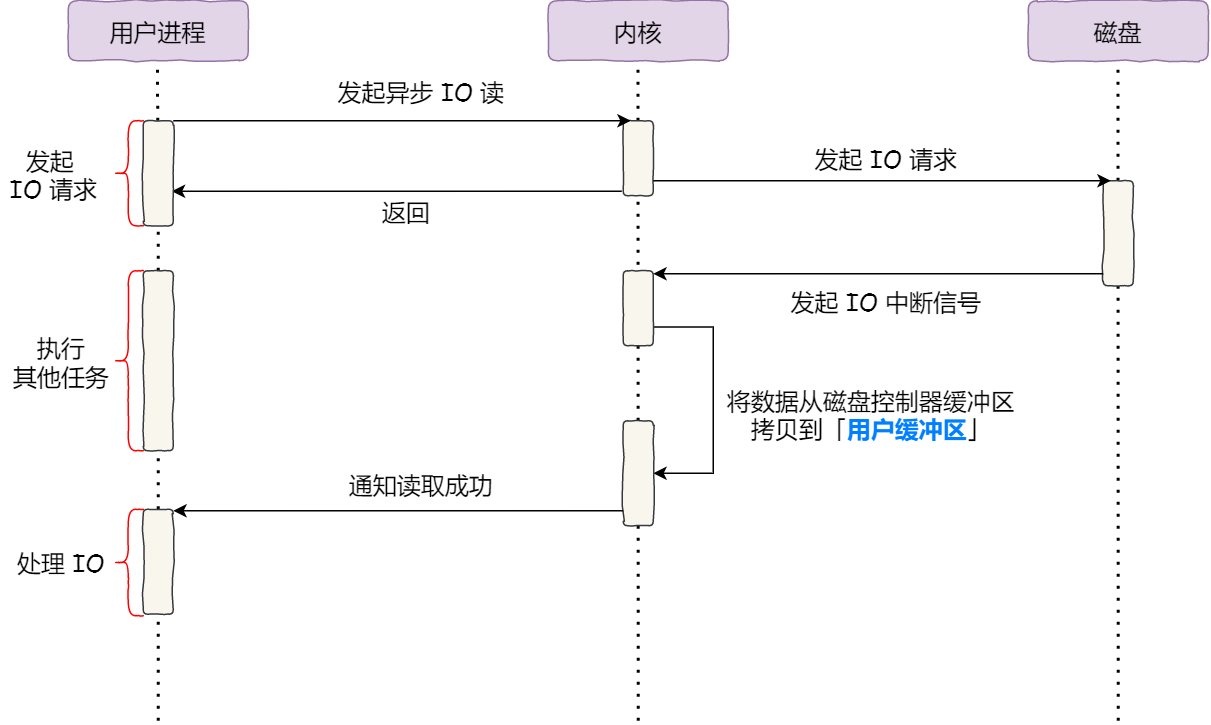
它把读操作分为两部分:
- 前半部分,内核向磁盘发起读请求,但是可以不等待数据就位就可以返回,于是进程此时可以处理其他任务;
- 后半部分,当内核将磁盘中的数据拷贝到进程缓冲区后,进程将接收到内核的通知,再去处理数据;
而且,我们可以发现,异步 I/O 并没有涉及到 PageCache,所以使用异步 I/O 就意味着要绕开 PageCache。
绕开 PageCache 的 I/O 叫直接 I/O,使用 PageCache 的 I/O 则叫缓存 I/O。通常,对于磁盘,异步 I/O 只支持直接 I/O。
前面也提到,大文件的传输不应该使用 PageCache,因为可能由于 PageCache 被大文件占据,而导致「热点」小文件无法利用到 PageCache。
于是,在高并发的场景下,针对大文件的传输的方式,应该使用「异步 I/O + 直接 I/O」来替代零拷贝技术。
直接 I/O 应用场景常见的两种:
- 应用程序已经实现了磁盘数据的缓存,那么可以不需要 PageCache 再次缓存,减少额外的性能损耗。在 MySQL 数据库中,可以通过参数设置开启直接 I/O,默认是不开启;
- 传输大文件的时候,由于大文件难以命中 PageCache 缓存,而且会占满 PageCache 导致「热点」文件无法充分利用缓存,从而增大了性能开销,因此,这时应该使用直接 I/O。
另外,由于直接 I/O 绕过了 PageCache,就无法享受内核的这两点的优化:
- 内核的 I/O 调度算法会缓存尽可能多的 I/O 请求在 PageCache 中,最后「合并」成一个更大的 I/O 请求再发给磁盘,这样做是为了减少磁盘的寻址操作;
- 内核也会「预读」后续的 I/O 请求放在 PageCache 中,一样是为了减少对磁盘的操作;
于是,传输大文件的时候,使用「异步 I/O + 直接 I/O」了,就可以无阻塞地读取文件了。
###重点
所以,传输文件的时候,我们要根据文件的大小来使用不同的方式:
- 传输大文件的时候,使用「异步 I/O + 直接 I/O」;
- 传输小文件的时候,则使用「零拷贝技术」;
在 nginx 中,我们可以用如下配置,来根据文件的大小来使用不同的方式:
location /video/ {
sendfile on;
aio on;
directio 1024m;
}
当文件大小大于 directio 值后,使用「异步 I/O + 直接 I/O」,否则使用「零拷贝技术」。
总结
早期 I/O 操作,内存与磁盘的数据传输的工作都是由 CPU 完成的,而此时 CPU 不能执行其他任务,会特别浪费 CPU 资源。
于是,为了解决这一问题,DMA 技术就出现了,每个 I/O 设备都有自己的 DMA 控制器,通过这个 DMA 控制器,CPU 只需要告诉 DMA 控制器,我们要传输什么数据,从哪里来,到哪里去,就可以放心离开了。后续的实际数据传输工作,都会由 DMA 控制器来完成,CPU 不需要参与数据传输的工作。
传统 IO 的工作方式,从硬盘读取数据,然后再通过网卡向外发送,我们需要进行 4 上下文切换,和 4 次数据拷贝,其中 2 次数据拷贝发生在内存里的缓冲区和对应的硬件设备之间,这个是由 DMA 完成,另外 2 次则发生在内核态和用户态之间,这个数据搬移工作是由 CPU 完成的。
为了提高文件传输的性能,于是就出现了零拷贝技术,它通过一次系统调用(sendfile 方法)合并了磁盘读取与网络发送两个操作,降低了上下文切换次数。另外,拷贝数据都是发生在内核中的,天然就降低了数据拷贝的次数。
Kafka 和 Nginx 都有实现零拷贝技术,这将大大提高文件传输的性能。
零拷贝技术是基于 PageCache 的,PageCache 会缓存最近访问的数据,提升了访问缓存数据的性能,同时,为了解决机械硬盘寻址慢的问题,它还协助 I/O 调度算法实现了 IO 合并与预读,这也是顺序读比随机读性能好的原因。这些优势,进一步提升了零拷贝的性能。
需要注意的是,零拷贝技术是不允许进程对文件内容作进一步的加工的,比如压缩数据再发送。
另外,当传输大文件时,不能使用零拷贝,因为可能由于 PageCache 被大文件占据,而导致「热点」小文件无法利用到 PageCache,并且大文件的缓存命中率不高,这时就需要使用「异步 IO + 直接 IO 」的方式。
在 Nginx 里,可以通过配置,设定一个文件大小阈值,针对大文件使用异步 IO 和直接 IO,而对小文件使用零拷贝
https://zhuanlan.zhihu.com/p/258513662
fasthttp ListenAndServe 默认是监听tcp4,导致IPv6的域名服务地址无法使用
fasthttp.ListenAndServe(addr, handler)
默认只支持tcp4,如果是用在IPv6环境下的服务,会导致请求被拒绝。查看其源码:
// ListenAndServe serves HTTP requests from the given TCP4 addr.
//
// Pass custom listener to Serve if you need listening on non-TCP4 media
// such as IPv6.
//
// Accepted connections are configured to enable TCP keep-alives.
func (s *Server) ListenAndServe(addr string) error {
ln, err := net.Listen("tcp4", addr)
if err != nil {
return err
}
if tcpln, ok := ln.(*net.TCPListener); ok {
return s.Serve(tcpKeepaliveListener{
TCPListener: tcpln,
keepalive: s.TCPKeepalive,
keepalivePeriod: s.TCPKeepalivePeriod,
})
}
return s.Serve(ln)
}
从这里得知要想listening on non-TCP4 media,需要自己定义Listener
方法:
ln, err := net.Listen("tcp", address) // 需要是tcp,这样才能兼容IPv6的域名服务
if err != nil {
panic(err)
}
if err := fasthttp.Serve(ln, router.Handler); err != nil {
panic(err)
}
查看监听地址,以下的为满足IPv6域名环境
netstat -anltp
tcp6 0 0 :::3000 :::* LISTEN 1/./server